


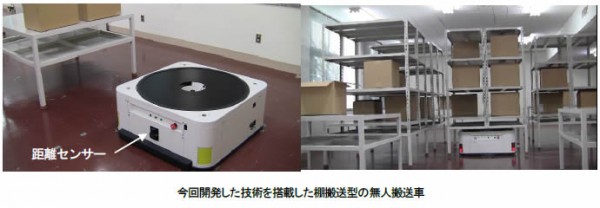
サービス・商品日立製作所は4日、物流倉庫などで商品を棚ごと搬送する無人搬送車向けに、搬送による商品棚の移動を検知し、無人搬送車に登録された商品棚の配置図をリアルタイムに更新しながら自車の位置を認識する技術を開発した、と発表した。
この技術により、これまで走行ガイドとして床面に敷設していたマーカーを使用せずに無人搬送車を自律走行させることができるようになる。マーカーが不要になることで、敷設・保守コストの削減、走行経路や設備レイアウトの設計自由度の向上が期待される。
通販市場の拡大や消費者ニーズの多様化に伴い、多品種少量の商品を扱う倉庫が増えており、扱う商品の種類や量の変動に柔軟に対応し、倉庫作業をより効率化するため、作業員のもとへ必要な商品を棚ごと搬送する無人搬送車が増えている。
日立も小型・低床式無人搬送車「Racrew」(ラクルー)を開発し、2014年9月から販売している。
無人搬送車が倉庫内を移動するためには、自車の位置を認識して進行方向を決める必要があり、これまでの棚搬送型の無人搬送車は、床面に1メートル間隔で貼られた2次元バーコードなどのマーカーを読み取ることで、自車の位置を認識していた。
しかし、物流倉庫では数千から数万個のマーカーが必要となり、マーカーの敷設や保守にコストが掛かるほか、走行経路や商品棚の配置がマーカーに依存するため、商品の量や種類の変動に応じた設備レイアウトの変更を容易に実施できないことが課題となっていた。
これまでも、マーカーを使用せず、無人搬送車に周囲の物までの距離を計測する距離センサーを搭載し、自車の位置を認識する手法が開発されてきたが、壁や柱の位置が登録されている配置図と移動中の計測結果とを照合することで、自車の位置を認識しているため、周囲の環境が大きく変化しないことが前提となっており、搬送により随時商品棚が移動する環境には適用できなかった。
そこで日立は、商品棚の配置が大きく変化する倉庫の環境で、マーカーに依存しない無人搬送車の自律走行を実現するため、周囲の環境変化をリアルタイムに検知して倉庫内の配置図を更新し、更新した配置図を基に自車の位置を認識する技術を開発。
無人搬送車に事前に登録する配置図を、倉庫の壁や柱などの「動かない領域」と、商品棚などの「動く領域」に分けて管理し、配置図と距離センサーで計測した柱や商品棚の位置情報を照合することで自車の位置を認識した後、「動く領域」にある商品棚の配置のみを更新する。
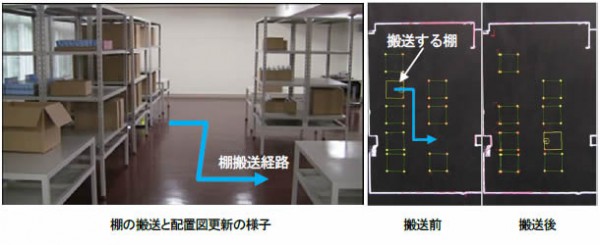
これにより、本来動くはずのない壁や柱の位置を誤って変更してしまうことなく、配置図の精度を高く保ち続けることが可能となる。さらに、配置図の更新対象を「動く領域」のみに限定したことにより、配置図を更新する時間の短縮を実現。無人搬送車は、商品棚の配置が移り変わる中で、その変化をリアルタイムに配置図に反映し、自車の位置を認識し続けることができるという。
同社が実施したシミュレーションでは、平均誤差10ミリで自車の位置を認識。同社のラクルーに搭載して床面マーカーを敷設していない小規模な実証スペースで商品棚の搬送を繰り返す実験を行った結果、搬送によって変化する商品棚の配置をリアルタイムに配置図に反映させながら自車の位置を認識し、自律走行と商品棚の搬送作業を行えることを確認した。




























{kind=link}