




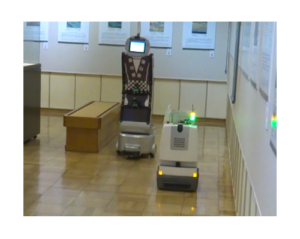
▲直接通信する移動ロボット(出所:東芝)
サービス・商品東芝は17日、複数の自律型移動ロボットを直接通信でつなげることにより迅速な相互回避や協調搬送を可能にする協調連携システムを開発したと発表した。
搬送や清掃や警備など用途が異なる移動ロボットはそれぞれ異なる運行システム上で動いており、ロボット同士が位置や走行方向の情報の共有ができず、通路上で複数台が立ち往生してしまうケースも珍しくない。東芝が今回開発したシステムは、移動ロボット同士が互いの情報を迅速に共有することで通路内での相互回避を実現することで、運行システムの異なるロボットの導入を促す。直接通信により低遅延通信が可能となるため、複数の同種の小型移動ロボットによる、大きな荷物の協調搬送も可能となる。
東芝は、運行システムを介さず、移動ロボット間で直接通信するプロトコルを定め、ロボット間の通信経路を切り替えることで直接通信をより低遅延で実現する無線LANマルチホップ方式で実装。移動ロボット同士が直接リアルタイムで情報を交換することを可能にした。
現状の移動ロボットは、停止している障害物であれば、回避する軌道を生成し回避することができるものの、互いに走行中の移動ロボットは進行方向が分からず回避が困難だ。東芝は、双方の位置と進行方向を共有することで滑らかなすれ違いができることを確認。上位の運行システムが異なるロボット同士であっても相互回避が可能だと分かった。
また、一つの搬送物を複数台の同種の移動ロボットがタイミングを合わせながら運搬できることも確かめた。必要に応じてロボットを追加することで、多様なサイズや重量の積載物に対応できる。安定した低遅延(10ms以内)の直接通信により、協調搬送を実現した。




























{kind=link}