




サービス・商品日立製作所、日立オートモティブシステムズ、クラリオンの3社は、歩行者の行動変化を予測し、衝突を防止する基本技術を開発した、と発表した。
3社は歩行者などの行動変化を予測し、リアルタイムで最適な速度パターンを高速演算することで、安全で実用的な速度で衝突を防止する基本技術を開発し、有効性を実験車で確認した。今後、検証を重ねることで技術開発を加速し、自動運転の実用化につなげる。
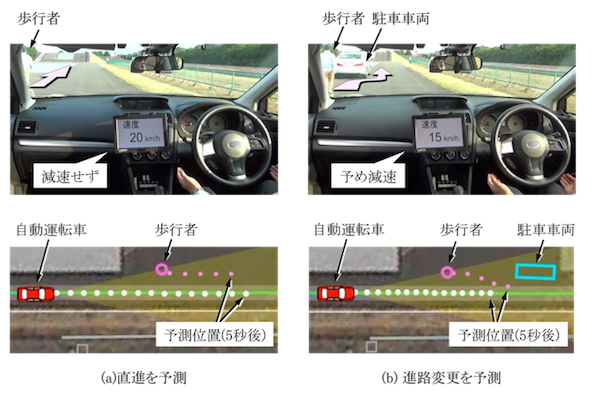
一般道では、通行車両や歩行者などの「動くモノ」やさまざまな障害物を認知し、これらの行動を予測・判断しながら安全に周囲の流れに沿って運転操作を行うことが必要だ。
認知だけでなく、その行動変化予測と予測に基づいて衝突を防止する運転計画をリアルタイムに実行することが求められており、今後は米国ミシガン大学が7月に開設した自動運転車やコネクテッドカーの走行実験プロジェクト「Mcity」(エムシティ)などの走行環境を活用し、実験車による評価検証を重ねていく。




























{kind=link}