


話題深刻な労働力不足に直面する物流業界で、自律走行搬送ロボット(AMR)による省人化に期待がかかる。従来型の無人搬送車(AGV)と違い、AMRはAI(人工知能)とセンサーを駆使して自律的に最適経路を算出、障害物を回避して効率的に搬送作業する。AIと機械学習技術は日進月歩。複雑な環境下の走行や障害物回避に対する信頼性は増す一方だ。
この潮流のなか、産業用自動走行ロボットの開発・販売、搬送管理ソリューションを提供するロボティクス企業として、2022年創業のハクオウロボティクス(東京都荒川区)に注目が集まる。同社の自動フォークリフト「AutoFork」(オートフォーク)はレーザー誘導方式と画像認識技術を融合した独自のアルゴリズムを使い、周囲の環境を正確に把握して的確にルートを守り、円滑かつ安全な移動を実現した。
すでに東京ロジファクトリー(立川市)への導入実績がある。実際の倉庫現場ではAutoForkが自らバレットを認識して取得、搬送、配置ができる。これにより、100メートル近い長距離の横搬送業務を担い、作業者の移動距離が削減し、肉体的負担が軽減する。今後の取り組みとして、24時間稼働による生産性向上など、導入メリットは計り知れない。「“モノを運ぶ”のない世界へ」との理念を掲げる同社の代表取締役CEO(最高経営責任者)・鈴木智広氏に話を聞いた。
▲ハクオウロボティクス代表取締役CEOの鈴木智広氏と「AutoFork」
 レーザースキャナーを使って反射板を検出、自分の位置を正確に把握
レーザースキャナーを使って反射板を検出、自分の位置を正確に把握
同社があるのはJR南千住駅から徒歩10分、東京都荒川区にある研究開発型の創業支援施設、白鬚西R&Dセンター。風光明媚な隅田川の岸辺を望む同施設は都中小企業振興公社が運営し、新たな製品や技術の研究開発を担う個人や中小企業を支援している。外観はまるでショッピングモールに併設する巨大駐車場のよう。鉄筋コンクリート3階建ての広大な建物の中に14の居室がある。各室は作業場を兼ね、そこでは日々、研究開発や試作を繰り返している。
同社が本社を構える2階の一室を訪ねた。室内の片隅に鎮座しているのは2台の青色のAutoFork。この自動フォークリフトはレーザー誘導方式を利用した独自の自律走行アルゴリズムと画像認識技術を融合、効率的な荷物搬送を可能にした。同機はレーザースキャナーを使って反射板を検出し、自分の位置を正確に把握する。床面工事は不要。倉庫内のレイアウト変更が容易だ。
特別なプログラミング不要、納入当日から使用可能
同機は側面に搭載したカメラが、倉庫内にあるパレットの位置や個数を自動で認識する。得た位置情報を基に自動で走行経路を生成し、指定の場所へと搬送する。人が置いたパレットでも機能し、複数を一度に運べる。人が走行させた経路を記憶し、再現できるプレイバック機能も強みだ。これにより、稼働のための特別なプログラミングやPC作業が不要。納入当日から使えるのもメリットと言える。
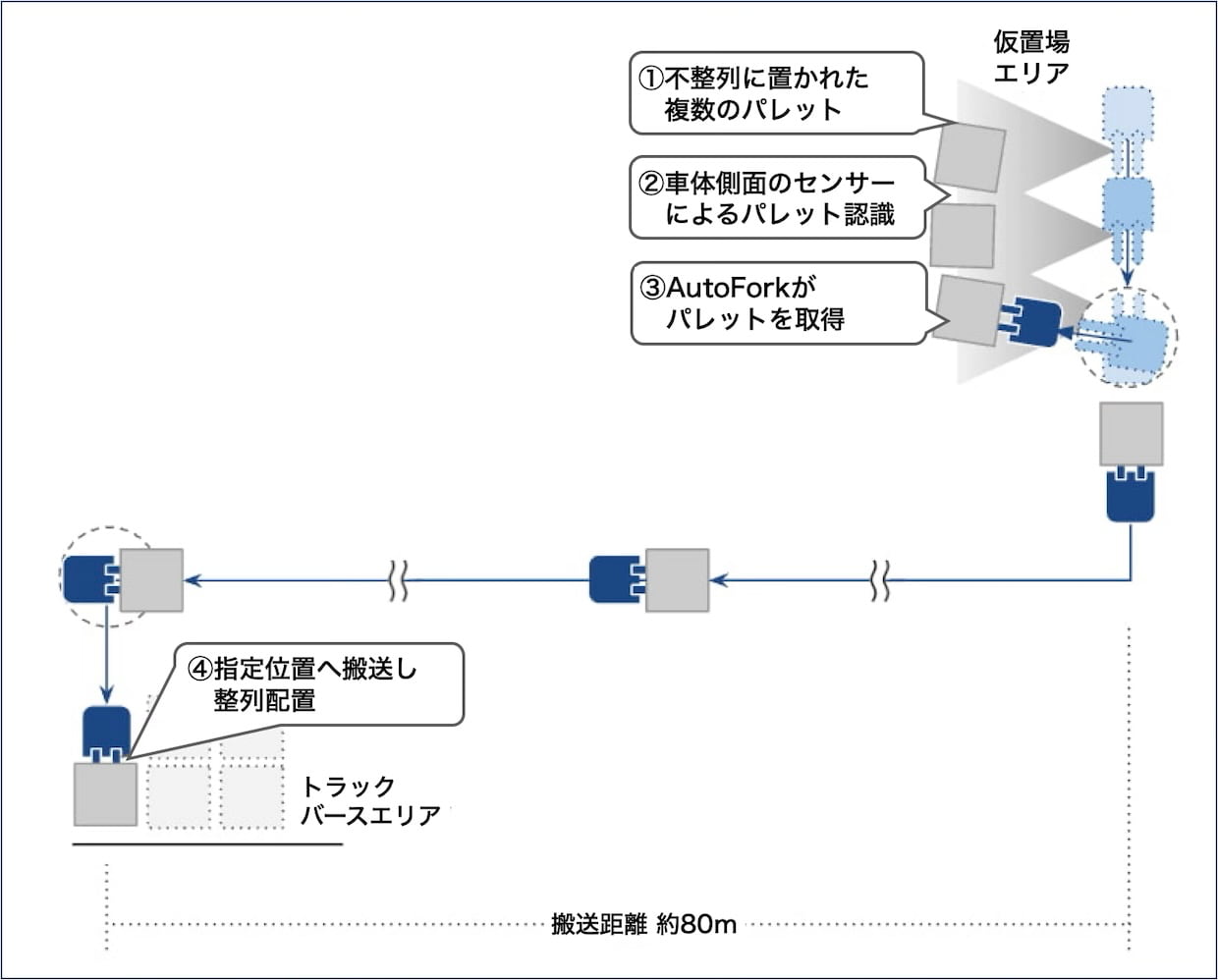
▲「AutoFork」認識技術のイメージ(クリックで拡大)
精度も群を抜いている。同機は走行・停止精度がプラスマイナス10ミリという高精度な制御技術を持つ。荷物用エレベーターとの連携機能も備えた。積み下ろした荷物を他階層へ自動で移動できる。倉庫内の縦方向の搬送が円滑となり、作業の効率化が進む。旋回時の必要通路幅は2.9メートル、最大荷重は570キログラム。複数のパレットが雑然と置かれている物流センターで使い勝手がいい。奥行きのあるパレット置き場でも利用可能だ。
物を受け渡すシステムや技術のレベルが高く、需要が多いと感じた
「これまで、タクシーの自動運転システムの開発などに携わってきた。そうした経験を経た結果、人を乗せることより、荷物を運ぶ方に多くのニーズがあることに気づいた」と鈴木氏は打ち明ける。荷物は運んで終わりではない。ある地点からある場所へと移動し、そこから別のエリアへと進む。そうしたモノを受け渡すシステムや技術のレベルが高く、かつ、需要が多いと感じたという。
「これらのニーズに応えるためにも、もっと実用化が必要と痛感した。それで独立して起業することを決めた」と振り返る。起業した頃から、これまで培ってきた技術を生かし、良い製品を作れば売れる確信があった。反面教師は当時の海外製の無人搬送フォークリフト。値段が高過ぎた。スピードやスムーズさも欠けていた。ひとたび障害物に当たれば即停止、動かない。満足いく製品は限りなく少なかった。
フォークリフト自身が物を認識してパレットを検索し、取りにいかせるにはどうすればいいのか。研究開発の日々が続いた。「正直、パレットを認識するだけなら簡単だ。しかし、認識したものがもし傾いていたら、どれほど傾いているのか、どのくらい離れた距離にあるのか認識させる必要があった。仮に、それができても、フォークリフトが荷物を取るために、自らが通路の曲がる角度や傾斜を判断し、安定走行できるルートを生成させることが次なる課題だった」
研究開発に必要だったシステムアーキテクチャーという概念
鈴木氏が研究開発を続けるなかで、意識したのはシステムアーキテクチャーという概念だ。これはシステムを構成する要素や相互関係を定義して、明確にするもの。この枠組みにより、システム全体の機能性と効率性が統合的に強化される。複雑なプロセスの理解が容易になるという。
「例えば、この部分は機械的には限界だから、ソフトでなんとかしようと策を講じることがある。すなわち、全体を俯瞰して、どれが、どこで頑張るのが一番いいのかを見極めるやり方だ。そのためにはシステム全体を概ね把握しておくことが大事だ。私はこれまで、ロボット工学などさまざまな分野で知見を深めてきたので、システムアーキテクチャーを意識しながら研究開発に従事できた」

現場の声も重視した。特に、無人搬送フォークリフトのルートを自分たちで変えたいという声が多かった。実際にはほんのわずかなルート変更でも、1か月かけて順番待ちしたエンジニアが1週間かけて走路を変えていた。そんな現状に辟易(へきえき)する声を各所で聞いた。
「現場は荷物の数や大きさ、形状も絶えず変化している。頻繁なルート変更もやむをえないのが現状だ。そうした声に応えるため、AutoForkは簡単なルート変更であれば、利用者自身でできるようにした」
鈴木氏は物流の未来にも思いを馳せる。それは自動化した大型設備を増やすイメージではない。自動化したフォークリフトをハブにして、エレベーターやコンベヤーなどシンプルな機器を連携、物流全体をオートメーション化する青写真を描く。
「自動化が進むことで、人は単純作業から解放されて、クリエイティブかつ複雑な仕事に専念できる。自身の技術を生かせる仕事に就ける。そうした環境作りを目指したい」
実際に現場に出て、数字では分からない情報が得られる
同社が組織として成長するには、優秀な人材の確保が必要だろう。そこで採用したい人材について聞くと、自分が手がけた製品が現場で使われることに着目、重視できる人物との答えが返ってきた。実際に使われる現場を訪れ、そこで得た知見が大きかった自身の経験が影響しているという。「私も最初の頃は、シミュレーションできていればいいとの考えがあった。しかし、実際に現場に出ると、数字に現れない不測の事態が起こる。そこから得た情報を基に、実用面を重視することが大切だ」
理想とする経営者はいないと苦笑いする鈴木氏。ちょっと間を置き、「強いて言うならビル・ゲイツが近いかな」と独り言のように、呟いた。「あくまで現実路線に基づき、Windows(ウインドウズ)のように使われるものをどんどん拡販していくマイクロソフトは目指すものに近いかもしれない」
一問一答
Q.スタートアップとして、貴社はどのステージにあるとお考えですか?
A. 2024年8月に大手不動産会社から資金調達して、それがシードになると思っています。今は製品の量産化に向けての拡大期。青春まっしぐらの思春期といったところです。
Q. 貴社の“出口戦略”、“将来像”についてお聞かせください。
A. 一番の目標はIPOです。数年以内、少なくとも10年かからないうちに果たしたいと思います。M&Aは考えていません。























{kind=link}