




認証・表彰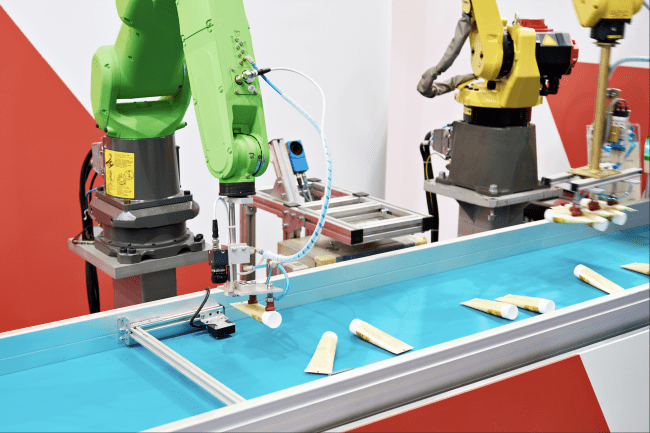 東大発ベンチャーのTRUST SMITH(トラストスミス、東京都文京区)は4日、人工知能を使った障害物回避型アームのアルゴリズム開発に成功し、特許を取得したと発表した。
東大発ベンチャーのTRUST SMITH(トラストスミス、東京都文京区)は4日、人工知能を使った障害物回避型アームのアルゴリズム開発に成功し、特許を取得したと発表した。
開発に成功したのは「リーマン計量」と呼ばれる微分幾何学の理論に基づくもので、空間内に存在する障害物を回避し、目的物へアプローチすることができるアルゴリズム。アームから見た空間内の物体との距離、相対速度、相対加速度に応じて適切に場を計量することができるため、障害物が動いていても安全に回避しながら、目的物へ到達できるという。
これにより、これまで手作業で行っていたピックアップ作業を自動で行えるようになるため、人件費削減と労働力不足の解消、データの蓄積と消費エネルギーの最適化、作業のミス・災害の防止――といった効果が見込める。






















{kind=link}