




荷主独Schmalz(シュマルツ)の日本法人シュマルツ(横浜市都筑区)は、箱詰めされた商品を決められた配置でパレット上に積み上げる「パレタイジング」、また山積みされた箱から一つを取り出して次の工程に搬送する「デパレタイジング」作業を担う真空グリッパーシステムを開発した。シュマルツは、大阪市住之江区のインテックス大阪で6月22日から3日間開催される「第3回関西物流展」で実演をまじえて披露する。
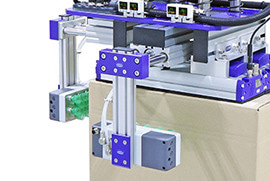
▲多様な段ボールに合わせたオプションを用意(出所:シュマルツ)
真空グリッパーシステムは、グローバル規模で長年培った物流業界における吸着ノウハウに裏付けられたシステム。このシステムで使用するパーツは、ハンドのサイズに合わせて標準化されている。様々な産業用ロボットに取り付け可能な「ロボット取付用フランジ」▽各種アクセサリーの搭載も可能な「ベースプレート」▽ワークに合わせて長さや吸着面を選択可能な「上部把持用グリッパー」▽より安定した搬送を実現する「側面把持用グリッパー」――の4つのモジュールで構成。ワークに合わせたハンドを作成しながらも設計・製造にかかる時間を短縮し、よりスムーズな提供が可能だ。
上面を把持する機能に加えて、オプション仕様として側面から吸着把持を行うグリッパーを最大で2個まで追加することができるのも特徴。最大3面からの吸着把持を行うことが可能だ。ミシン目の入った段ボールや、ホットメルトを使用した段ボール、従来のような上面のみを吸着する方法では負荷が大きくかかってしまう場合も、側面からの把持を追加することで、負荷を分散しつつ安定した搬送を実現できる。
ロボットハンド全体を設計から製作までシュマルツが担うことから、ハンド製作における顧客のリソースやプロジェクト管理における間接費の削減にも寄与する。産業用ロボットを使った吸着テストも可能なため、顧客ならではのワークを使用して吸着性能を確認できる。




























{kind=link}