




サービス・商品情報通信研究機構(NICT、東京都小金井市)とテクノ菱和(豊島区)は17日、インパルス型超広帯域無線(IR-UWB)を用いて自律走行ロボット(AMR)を簡便に自律走行させるシステムの開発に成功したと発表した。クリーンルームなどでの環境計測作業の省力化や低発塵環境での清浄度測定が可能になり、計測や物流、建築などの分野でのAMRの活用も期待できる。
自律走行方式はLiDARセンサーとSLAMを組み合わせたシステムが主流だが、クリーンルーム内にはステンレスなどの鏡面が多いため、レーザーが誤作動する可能性があり、磁気テープやカラーテープを床面に貼って誘導する自律走行方式も床を汚すため使えない。また、従来のIR-UWB測位システムは、対象エリアに複数台のIR-UWB基準端末を配置する必要があり、全てのIR-UWB基準端末の座標標定と対象エリアの地図作成といった事前作業が煩雑だった。
開発された新たな自律走行システムは、事前の座標標定や地図作成が不要で、目標端末を置くだけで目標地点が設定される。移動端末を載せたAMRはそれぞれの目標地点へ順に連続自動走行し、それぞれ20センチの精度で指定範囲にたどり着く。
このシステムのために、NICTは「AMRに置く2台の移動端末と目標地点の目標端末との二つの距離計測結果に基づいて目標地点までの距離と方向角を推定するアルゴリズム」を、テクノ菱和は「AMRの走行速度・加速度及び回転角速度・角加速度を考慮に入れた駆動制御アルゴリズム」を開発した。NICTのアルゴリズムによる目標地点推定部と、テクノ菱和のアルゴリズムによるAMR駆動制御部が連携し、AMRは方向角をアップデートしながら走行する。
同システムを使えば、休憩時間や休日、夜間でも測定可能となるほか、人間と比べて発塵量が少ないロボットによって正確な清浄度を測定でき、作業効率と測定精度の向上を図れる。
同システムは、IR-UWBの距離計測に基づき目標地点推定部とAMR駆動制御部が情報交換しながら、それぞれ単独で制御しているが、今後、CPUを統合することで2つの制御を一体化し、システムの小型化と制御効率向上を目指す。
同システムは、20、21の両日にNICT本部で開催される「NICTオープンハウス2025」に出展される。
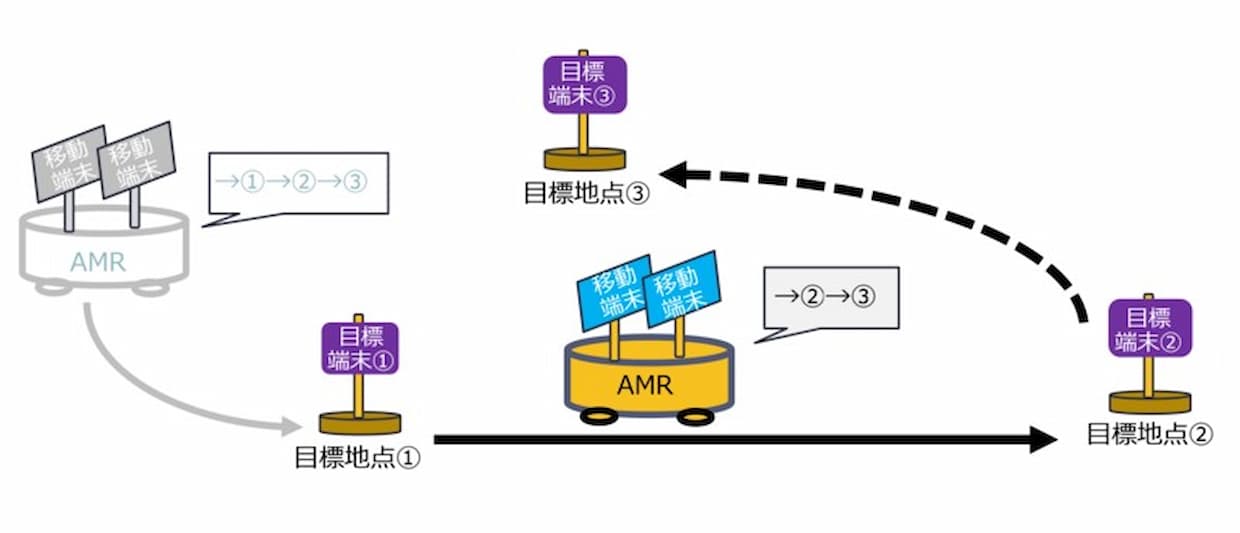
▲AMRが複数の目標地点に連続で自律走行するイメージ図(クリックで拡大、出所:情報通信研究機構)
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。LOGISTICS TODAY編集部
メール:support@logi-today.com




























{kind=link}