




調査・データ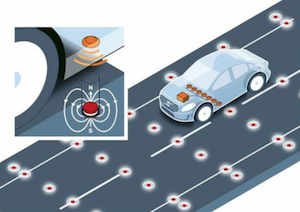 ボルボ・カー・ジャパンは11日、自動運転を行う車両が自車の位置を正確に把握するために、道路に埋め込まれたマグネット使用する方法を用いた研究プロジェクトを実施した、と発表した。プロジェクトは、自動運転車の実現に向けて、スウェーデン運輸管理局と連携して実施した。
ボルボ・カー・ジャパンは11日、自動運転を行う車両が自車の位置を正確に把握するために、道路に埋め込まれたマグネット使用する方法を用いた研究プロジェクトを実施した、と発表した。プロジェクトは、自動運転車の実現に向けて、スウェーデン運輸管理局と連携して実施した。
ボルボの研究チームは、イェーテボリ郊外のヘラレッドに、長さ100メートルのテストコースを建設し、丸いフェライトマグネット(40ミリ×15ミリ)を一定間隔で、路面から地中200ミリの深さに配置。テスト車には、複数の磁力センサーを装着した。
今回の研究プログラムでは、検出範囲、信頼性、耐久性、コスト、道路の維持管理への影響などを評価。ボルボ・カー・グループの予防安全技術リーダー、ヨーナス・エクマーク氏は「これまでのテストにより、インフラ整備や車体オンボードセンサーでの検知技術の両面で、フェライトマグネットの使用が効率的で信頼性が高く、比較的安価なソリューションであることが分かってきた。次のステップでは、実際の交通環境でテストを実施する」と話した。
同社の説明によると、GPSやカメラなど既に確立されている測位技術は「特定の条件で制限を受ける」が、道路に埋め込まれたマグネットであれば「物理的な障害物や悪天候の影響を受けない」として、プロジェクトが取り組む技術の優位性を強調。
エクマーク氏は、マグネットを用いた技術の正確さについて「マグネットは最大誤差10センチメートル未満の、目に見えない道路を作り出す。さまざまな速度域でテストを繰り返し、将来的に有望な結果が得られている」と説明する。
走行試験プロジェクトは、ボルボ本社のあるスウェーデン・イェーテボリ市内や近郊の特定一般公道で、100台の自動運転機能を搭載したボルボ車が自律走行する大規模取り組みとして行われており、「あらゆる場面で自動車が自律走行できるようにすること」を目指している。
具体的には、「現在の道路インフラを変更せずに自動運転を実現すること」「道路標識を補完する機能」「測位技術を組み込んだ予防安全システムによる、車両が道路から飛び出すような交通事故の防止」「雪に覆われ見えなくなった道路端のガードレールや標識との接触防止と道路メンテナンスの簡略化」などの場面を想定。正確な自車位置の測位により、これまで以上に道幅を狭くできるため、不要な道路スペースの有効利用を促進できるとしている。




























{kind=link}