




サービス・商品パナソニックコネクト(東京都中央区)は19日、中央大学とともに、10月1日から5日にかけて米ミシガン州で開催された、電気・情報工学分野で世界最大規模の学術研究団体IEEE(Institute of Electrical and Electronics Engineers)で、ロボットハンド制御技術の研究成果を公開したと発表した。
同社は、ロボットハンドでつかんだ対象物の位置や姿勢をハンド内で変更するインハンドマニピュレーションの開発を行っている。同技術を使えば、部品をピックして組み立て可能な姿勢に変更した後に相手側の部品にプレースする部品組み立て作業や、倉庫での箱詰めやパック作業、小売店舗などで商品を決まった姿勢で並べる作業への応用が可能だ。
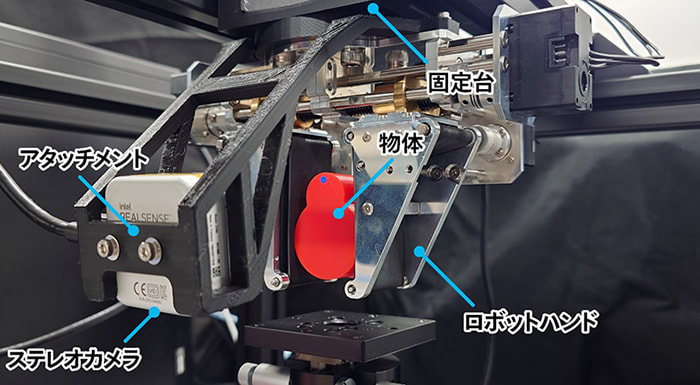
▲ロボットハンドの構成(出所:パナソニックコネクト)
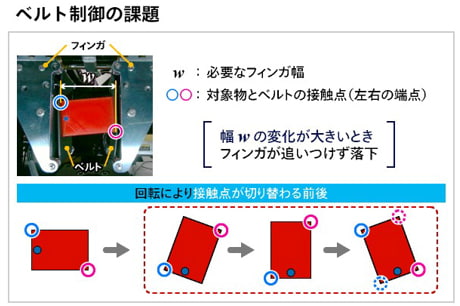
この技術は昨今注目されているものの、姿勢変更のために対象物をハンド内で回転させる際、対象物の形状や姿勢によってはつかみ続けることができず、ハンドから落下するという課題がある。対象物の表面とロボットハンドとが接触を維持するには、対象物の形状や回転中の姿勢に合わせてフィンガー同士の幅を調節する必要があるため、同社はカメラ画像を基に対象物とハンドとが接触している部位の変化を予測し、その前後において対象物の回転速度が最も遅くなるようにベルトを制御することで、幅変化を抑える仕組みを開発した。
![]()
(クリックで拡大)
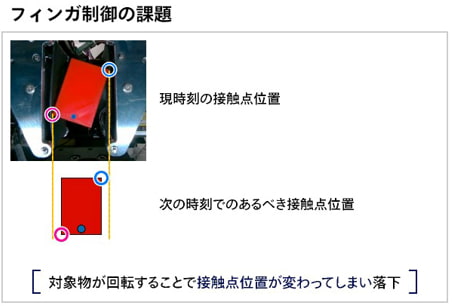
また、通常は電子機器を制御する際には、センサーにより現在の状態を観測し、観測値に基づいて次の時刻における制御値を決定するフィードバック制御が広く採用されているが、それでは現在観測している対象物の位置や姿勢と次の時刻での状態が異なり、対象物落下の原因となる。そのため、次の時刻における対象物の位置や姿勢を予測することで、次の時刻で必要となる幅の分だけフィンガーを制御する仕様とすることで対象物落下を防止する。
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。LOGISTICS TODAY編集部
メール:support@logi-today.com




























{kind=link}