


サービス・商品東芝は17日、複数の吸着パッドを持つロボットハンドが、形状や向きに合わせて物をつかめるようにするAI技術を開発したと発表した。乱雑に置かれた形状や外観の異なる物品のピッキング作業など、従来の技術では自動化が難しかった作業を、ロボットに任せられるようになる技術だとしている。
今般の開発したロボットハンドは、4つの吸着パッドを持つハンドを使い、それぞれの吸着パッドを個別に制御できるようにした。吸着パッドをいくつ使うか、どれを使うかといった計算を、対象物のサイズや形状に合わせてAIが行う。
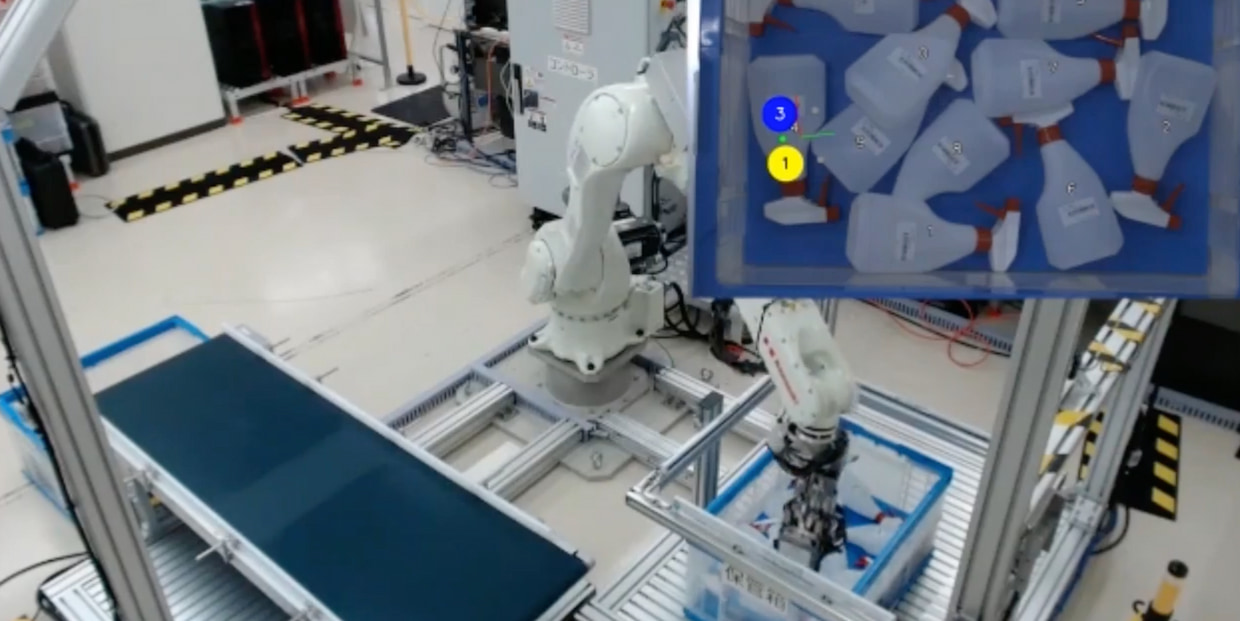
▲AIを用いたピッキングの様子(出所:東芝)
従来の手法では、対象物を画像として写し、AIがパッドを吸着させる位置を推定する計算を繰り返し行ったうえで、その中から最適な把持位置を決めていた。しかし、それでは吸着位置の計算に時間がかかり、自動化が困難だった。
同社が開発した手法は、ハンドが対象物に接触できる面を検出する1段目のモデルと、検出した面の法線方向に基づいて射影変換させた画像からハンドの向きと吸着位置を決定する2段目のモデルで構成されている。1段目のモデルで出力される情報(特徴マップ)を2段目のモデルの計算にも活用することで、繰り返しの計算が不要となり、一回で把持可能な吸着位置を特定できるようになったため、計算時間を大幅に短縮することに成功した。
また、従来の技術では対象物が密集している場合、精度が低下する傾向があったが、独自の技術によって、対象物の傾きに合わせたハンド姿勢を正確に学習し、物体の向きがバラバラで乱雑に置かれていても把持することができるようにした。
実際のロボットに搭載したカメラから取得した画像およそ4000枚を、開発したAIに事前学習させたうえで、272枚の画像を使ってつかむ位置などを計算させたところ、従来の研究例の計算時間5.62秒、成功率73.9%を大きく上回る、計算時間0.47秒、成功率80.1%を達成した。
さらに開発したAIを実機ロボットに搭載したところ、平均94.5%の成功率で対象物をつかむことができ、実用化レベルであることも確認した。
これによって、封筒や書類などの平面の物品から、各種サイズの箱や円筒容器、チューブ容器まで高さや奥行が異なり、形も違う多種多様な物品を、高速で、正確に自動でピッキングできるようになる。学習をさせる際、技術者によるプログラミングも不要で、対象物の種類が増えた場合でも追加学習は必要ない。
同社では今後、実際の物流倉庫での実証実験を行うとともに、さらなる研究開発を進め、2026年度以降の実用化を目指す。
この技術の詳細は、今月14日から18日にかけてアラブ首長国連邦(UAE)で開催されるロボティクス分野の国際学会「IROS2024」で発表される。
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。LOGISTICS TODAY編集部
メール:support@logi-today.com




























{kind=link}