




サービス・商品全方向移動ロボットの開発を手掛けるTriOrb(トライオーブ、福岡県北九州市)は14日、同社が開発する全方向移動ロボット「トライオーブ・ベース」の資材搬送装置の開発を目的とした実証実験を、戸田建設(東京都中央区)と開始したと発表した。トライオーブ・ベースはコンパクトな形状で、荒れた床面や狭い場所、精緻な移動が必要な場面で活用できる。
この度、建設現場でのトライオーブ・ベースの基本性能を確認するため、段差・溝部分の走行や積載重量270キロでの検証実験を実施。取得したデータを元に、同機のハードウェアを改修し、現場環境下で走行可能な自律型全方向移動ロボットの開発を促進する。
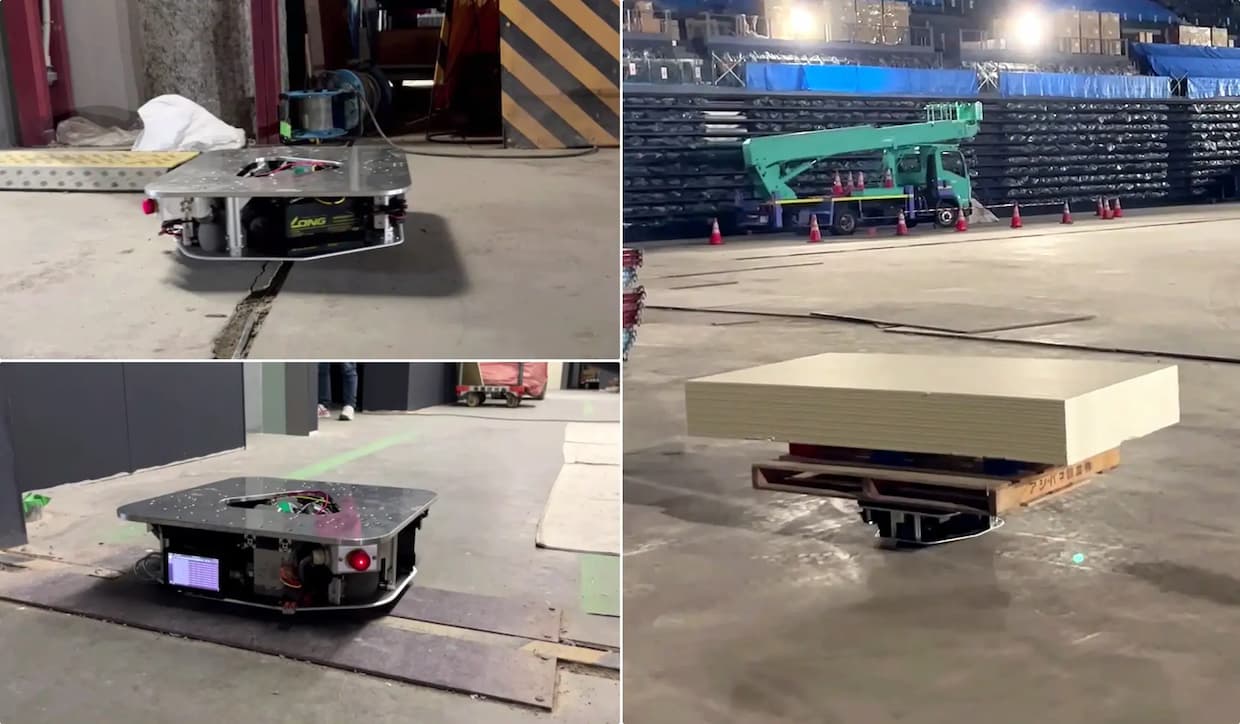
▲TriOrb BASEを用いた段差や溝の資材搬送実験の様子(出所:TriOrb)
建設現場での走行ロボットの開発に関しては、倉庫などで使用されるAMR(無人搬送台車)の転用が試されてきたが、建設現場特有の荒れた走行路面や変化する環境、多数の資材が配置された場所での効率的な移動などが課題だった。
トライオーブ・ベースには、これらの課題を克服できる可能性があり、建設現場で安定した自律移動型の資材搬入装置の実現を目指すため、今回の研究開発をスタートさせた。
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。LOGISTICS TODAY編集部
メール:support@logi-today.com




























{kind=link}