


荷主KiQ Robotics(キックロボティクス、北九州市小倉北区)は15日、ロボットハンドツール「ラティス構造柔軟指」を活用したフィジカルAI(人工知能)の研究開発に着手したと発表した。多品種ワーク搬送や位置ずれ吸収技術を活用し、産業現場向けロボット作業学習基盤の構築を目指す。
フィジカルAIは、AIが現実世界で対象物を認識し、掴み、動かす技術領域。製造現場では多品種少量生産やワーク形状のばらつきが課題となっており、認識精度だけでなく、実際の接触や把持の安定性が求められている。
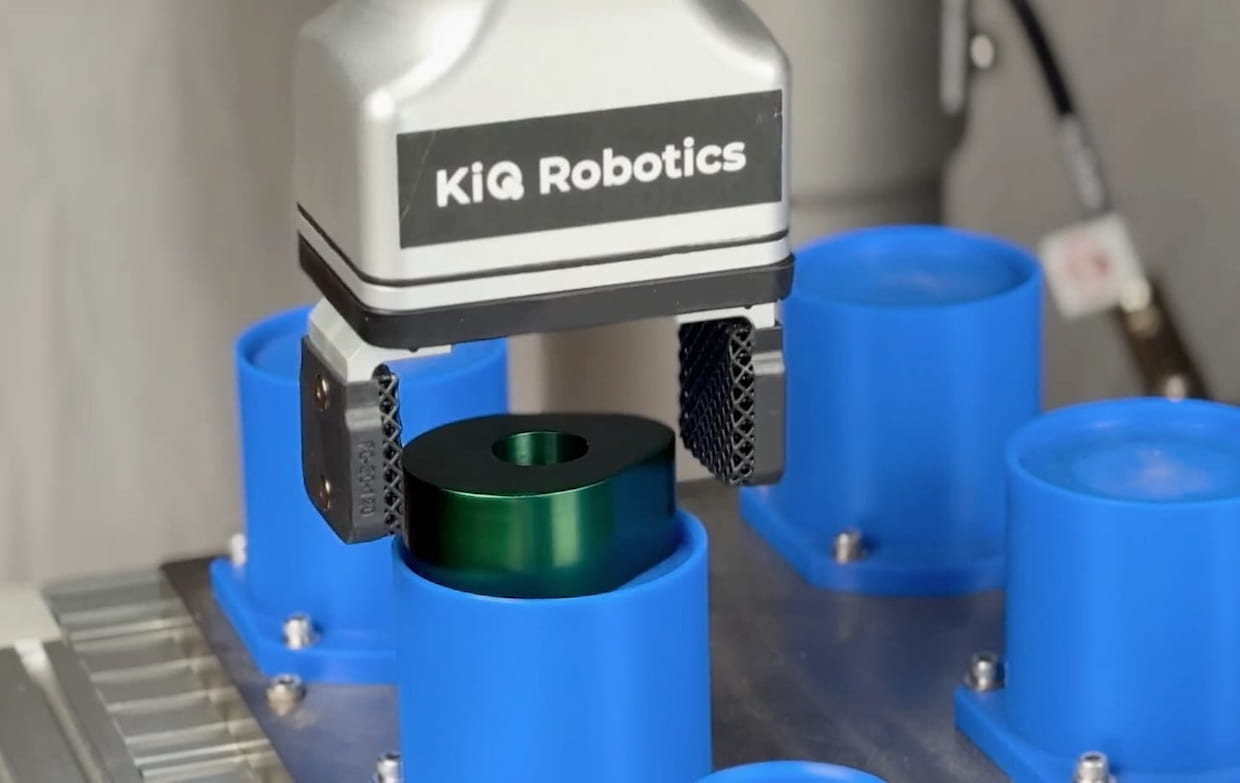
▲ロボットハンドツール「ラティス構造柔軟指」を活用したフィジカルAI(出所:KiQ Robotics)
同社の「柔軟指」は、ラティス構造の柔らかい指先が対象物に沿って変形し、面接触で把持するロボットハンドツール。位置ずれや形状差を吸収できる点が特徴で、多品種ワーク搬送やワーク傷低減などを目的に製造現場へ導入されている。ことし4月時点で導入実績は130件超、導入企業は50社超という。
今回の研究開発では、公開研究プロジェクト「Universal Manipulation Interface」(UMI)の可搬データ収集の考え方を参考に、実機を長時間占有せずに教師データを収集する仕組みを構築する。接触特性やデータ品質管理、段階的な実機評価を組み合わせ、AI制御と柔軟指を連携させた作業学習基盤を開発する。
九州工業大学田向研究室では既に同社の柔軟指を活用した人工知能研究が進められている。家庭用サービスロボットの動作データ収集において、厳密な位置合わせが不要でも安定把持しやすい点が評価されている。
今後は、多品種ワーク搬送や位置ずれを含む把持工程を中心にPoCを進めるほか、現場データや安全確認を組み合わせた評価基盤構築を進める。

▲九州工業大学での研究活用事例(出所:KiQ Robotics)
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。
LOGISTICS TODAY編集部
メール:support@logi-today.com
LOGISTICS TODAYでは、メール会員向けに、朝刊(平日7時)・夕刊(16時)のニュースメールを配信しています。業界の最新動向に加え、物流に関わる方に役立つイベントや注目のサービス情報もお届けします。
ご登録は無料です。確かな情報を、日々の業務にぜひお役立てください。




























{kind=link}