




ロジスティクスコマツは8日、JAXA宇宙探査イノベーションハブが進める共同研究制度「Moon to Mars Innovation」の第13回研究提案募集で、月面物流ローバーなど3件が採択されたと発表した。将来の月面探査や拠点整備を見据え、重量物やレゴリス(月面を覆う微細な砂)の輸送、掘削作業に対応する建設・物流機械の要素技術を開発する。
中心となるのは、次世代月面ロジスティクスに資する積載能力強化型物流ローバーの研究開発。慶應義塾大学などと共同で、ローバー本体の質量を超えるペイロードを積載できる物流ローバーの実現を目指す。研究期間は3年間で、機能・システム要求の検討、走行可能な地上試験モデルの開発、デモンストレーション、宇宙仕様化に向けた課題抽出などを進める。
コマツはこのなかで、大きな荷重に耐えながら、実用的な移動速度、障害物の乗り越え、急斜面の登坂性能を備えた小型・軽量の走行装置を担当する。月面では太陽電池タワーなどの重量物や建設資材の移動が想定され、地上の物流とは異なる環境下で、輸送機能そのものがインフラ構築の前提となる。
このほか、月面の低重力環境を模擬する掘削試験機と自動掘削制御技術、真空環境下でも使える電動アクチュエーターの研究開発も行う。月面では重力が地球の6分の1となるため、建機が地面に十分な力を加えにくく、安定した掘削が難しい。通常の油圧システムも真空環境では制約を受けるため、電動化や自動制御が重要になる。
コマツは2021年に国土交通省と文部科学省の「宇宙無人建設革新技術開発」に選定されて以降、建設・鉱山機械で培った知見を基に、月面建設機械の研究開発を進めてきた。今回の採択は、月面での「運ぶ」「掘る」「動かす」という基礎機能を、物流と建設の両面から具体化する。
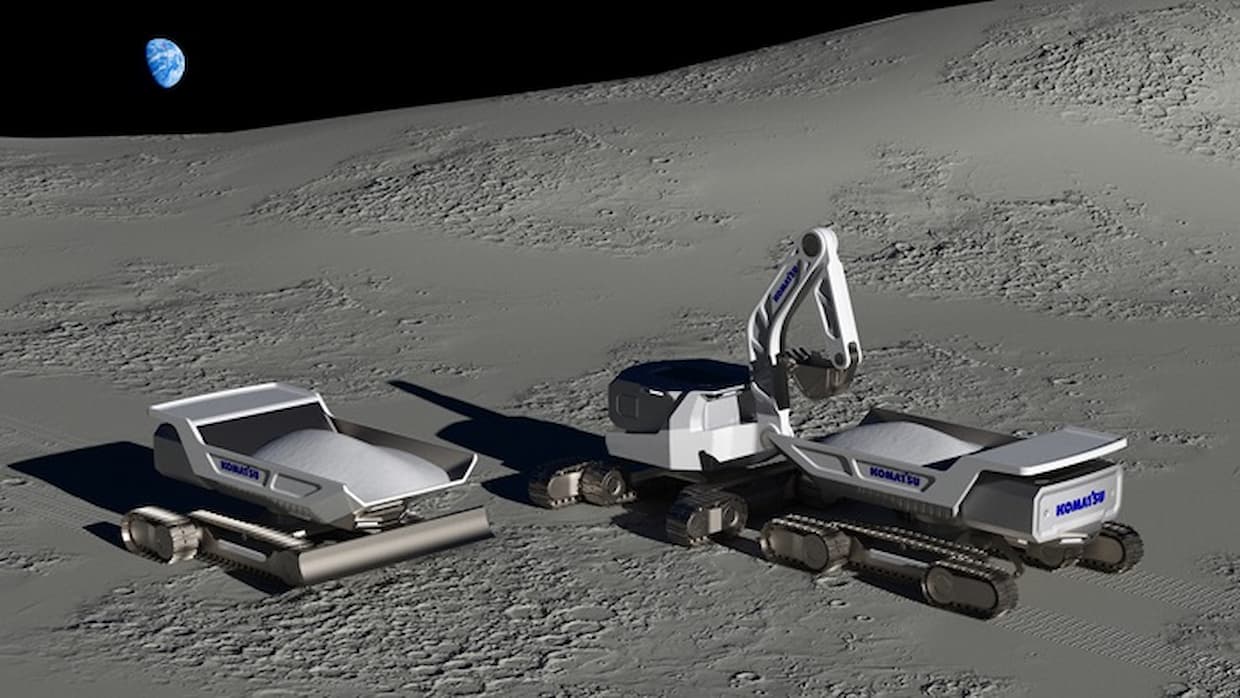
▲月面建設機械のイメージ(出所:コマツ)
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。
LOGISTICS TODAY編集部
メール:support@logi-today.com
LOGISTICS TODAYでは、メール会員向けに、朝刊(平日7時)・夕刊(16時)のニュースメールを配信しています。業界の最新動向に加え、物流に関わる方に役立つイベントや注目のサービス情報もお届けします。
ご登録は無料です。確かな情報を、日々の業務にぜひお役立てください。




























{kind=link}