




調査・データKDDIは16日、2月19、20日に、福島ロボットテストフィールド(福島県南相馬市)において、異なるドローン運航管理システム(UTMS)が連携し、同一空域でのドローン衝突を回避する基盤構築実証に成功したと発表した。
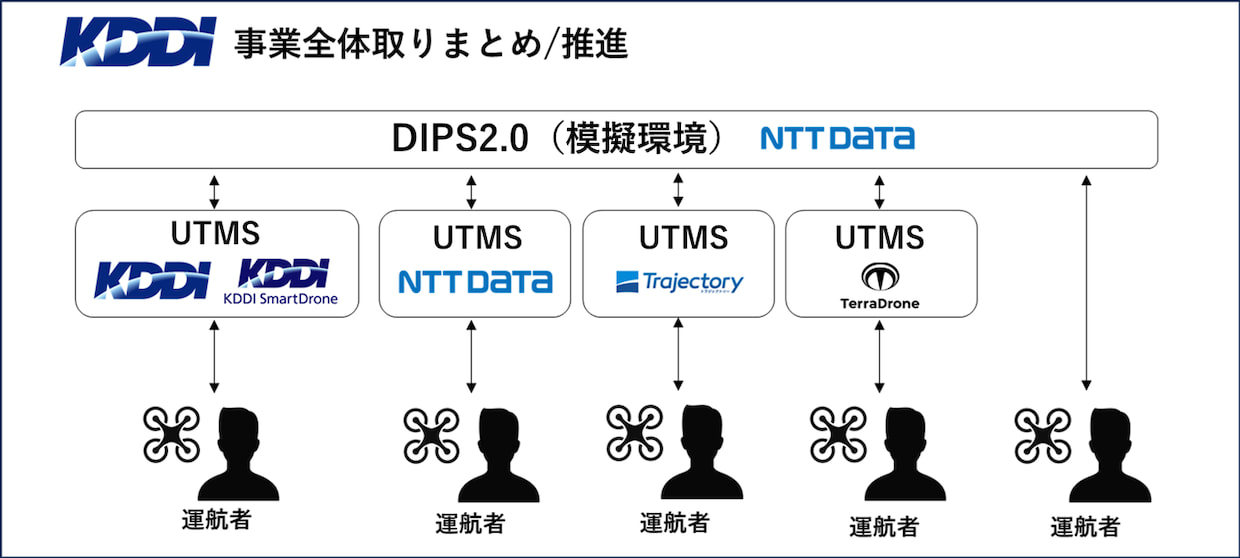
▲ドローン運航管理システム「UTMS」イメージ(クリックで拡大、出所:KDDI)
従来、異なるUTMSが運航管理するドローンは、運航管理手法が異なるため同一空域での飛行が困難だった。今回の実証により、同一空域で異なるUTMSが運航する複数のドローンを安全に運航することが可能になった。同社は、同実証の成果を踏まえ、複数のドローンを活用した災害時の遭難者の早期発見や被災地への物流配送などを促進する。
本実証は、新エネルギー・産業技術総合開発機構(NEDO)が推進する「次世代空モビリティ実現プロジェクト」(ReAMoプロジェクト)の一環として実施された。KDDIは今回の成果を基に、UTM運用基盤の機能強化と「UTMサービスプロバイダ認定制度」の開始に向けた運用ルール整備に取り組んでいる。
■「より詳しい情報を知りたい」あるいは「続報を知りたい」場合、下の「もっと知りたい」ボタンを押してください。編集部にてボタンが押された数のみをカウントし、件数の多いものについてはさらに深掘り取材を実施したうえで、詳細記事の掲載を積極的に検討します。
※本記事の関連情報などをお持ちの場合、編集部直通の下記メールアドレスまでご一報いただければ幸いです。弊社では取材源の秘匿を徹底しています。LOGISTICS TODAY編集部
メール:support@logi-today.com























{kind=link}